L'apprentissage moteur, un domaine central dans la compréhension de la manière dont les compétences physiques sont acquises et modifiées, a fait l'objet de diverses définitions au cours des deux dernières décennies. Contrairement au contrôle moteur, qui se concentre sur la maîtrise de mouvements déjà acquis, l'apprentissage moteur explore l'ensemble des idées abstraites sur son acquisition et sa modification. Il offre une perspective temporelle axée sur les caractéristiques du processus d'apprentissage. Shumway-Cook et Woolacott le définissent comme « un ensemble de processus associés à la pratique ou à l’expérience qui impliquent des changements relativement permanents dans la capacité à produire une action compétente ».
Le développement d’une nouvelle compétence émerge de la relation que le sujet établit avec l’activité en cours de développement et le contexte dans lequel elle se déroule. Ainsi, la récupération d’une fonction ou le réapprentissage nécessite la recherche de nouvelles solutions liées à une activité spécifique dans un environnement particulier, en tenant compte des limites imposées par les caractéristiques cliniques du sujet. L’apprentissage de compétences complexes, telles que les activités de la vie quotidienne, implique la compréhension de processus qui nous sont actuellement inconnus. Tous ces facteurs doivent être pris en compte lors de la mise en œuvre d’un programme d’intervention.
La Nature de l'Apprentissage Moteur et son Impact
L'apprentissage moteur est un processus durable de transformation de la motricité, résultant de la pratique et de l'expérience. Il implique une modification durable des manières de percevoir et d'agir, dans une interaction dynamique entre l'élève et son environnement, comme le soulignent Schmidt (1993), Récopé (2020) et Theureau (2015). L'engagement de l'élève, fondé sur sa capacité à mobiliser ses ressources pour donner du sens à ses activités, est facilité par l'agentivité (Bandura, 2002).
La gestion de la charge attentionnelle est cruciale pour éviter la surcharge cognitive (Welford, 1968 ; Piéron, 1992 ; Schmidt). Elle consiste à limiter le flux d’informations via des repères et des feedbacks. La pratique variable, qui implique de diversifier les situations d'apprentissage, permet de construire des schémas moteurs généralisés, favorisant ainsi la transférabilité des compétences (Schmidt, 1993). La création d'une communauté d'apprentissage, avec des rôles socio-participatifs et l'apprentissage vicariant, contribue à la co-construction des savoirs et à la motivation (Adé & Terré, 2024 ; Garsault, 2004 ; Bandura, 2002).
Les Mécanismes d'Enseignement et la Structuration de l'Apprentissage
Les mécanismes d’enseignement sont essentiels pour maximiser les résultats de l’apprentissage et doivent être adaptés aux besoins individuels, en tenant compte des caractéristiques du sujet, de l’activité à former et du contexte dans lequel la formation aura lieu. L'enseignement est l'un des moyens les plus fréquents et pertinents pour guider le processus d’apprentissage, dont la plus grande contribution est généralement liée à la génération d’une idée ou d’une image globale du mouvement qui peut servir de guide pour la première tentative.
Ces mécanismes mettent l’accent sur la capacité à reconnaître les erreurs, à guider le processus et à fournir les données nécessaires à l’établissement de l’objectif, sans oublier que les mots ne peuvent pas définir la complexité d’un mouvement par le biais d’une instruction. La démonstration d’une habileté motrice, dans laquelle les sujets peuvent observer directement les éléments de l’action, confère une plus grande efficacité à l’utilisation d’instructions verbales, qui en elles-mêmes peuvent ne pas être efficaces pour l’apprentissage moteur.
Nous savons maintenant que les informations observées (modélisées) contribuent à l’apprentissage des caractéristiques qualitatives de l’habileté motrice. L’avantage d’observer une démonstration habile est que l’observateur détecte les caractéristiques qui sont constantes dans le modèle de mouvement observé dans l’exécution de la compétence. La stratégie la plus efficace dans l’utilisation de la modélisation consiste peut-être à combiner une démonstration structurée avec une pratique physique par l’observateur.
La Technique Corporelle : Entre Fonctionnalité et Culture
La technique corporelle, selon Mauss (1934, 1936), est une « manière socialement construite et efficace d'utiliser son corps ». Elle intègre des dimensions fonctionnelles, culturelles et processuelles, s'éloignant d'un modèle formel pour devenir un processus de construction de solutions motrices par l'élève. Ce processus est basé sur l'expérience et la compréhension de l'utilité du geste (Mauss, 1934, 1936 ; Marsenach, 1994 ; Gal-Petitfaux, 2009). Elle repose sur trois dimensions fondamentales : une réponse intentionnelle et efficace à un problème moteur (fonctionnelle), une réponse partagée au sein d’une communauté (culturelle), et une intégration progressive par l’expérience (processuelle).
La maîtrise technique implique aussi une dimension scientifique et mécanique, notamment l’acquisition du Programme Moteur Généralisé (Schmidt, 1993), qui permet d’adapter la réponse motrice aux contraintes du milieu. La perception et l’énaction jouent un rôle clé, la technique étant une réponse à une lecture sensorielle du milieu (Berthoz, 2013). La stabilisation du référentiel céphalo-centré, la création de la Ligne Fonctionnelle d'Impulsion (Duvigneau, 2014), la dissociation inter-trains (Dedieu, 2013) et l’usage de segments libres (Dhellemmes, 1995) sont essentiels pour une efficience biomécanique. L’enseignant doit manipuler les contraintes d’espace ou de temps pour transformer les attracteurs, en évitant la surcharge cognitive en orientant l’attention vers des indices pertinents (Sweller, 1988 ; Welford, 1968). La réorganisation motrice, souvent née d’un conflit cognitif, permet de faire évoluer les habitudes inefficaces vers des solutions plus adaptées (Piaget, 1974). Le modèle P.A.C.E. fournit un cadre pour cette approche.
L'Activité en Éducation Physique et Sportive (EPS)
L'activité en EPS englobe l'ensemble des processus cognitifs, émotionnels et moteurs mobilisés dans un contexte matériel, social et temporel. Elle ne se limite pas au mouvement visible ; elle inclut l'engagement subjectif de l'élève, ses intentions et ses motifs d'agir. Selon Theureau (2006, 2015), cette activité est toujours "située", ce qui signifie qu'elle dépend du contexte spécifique dans lequel elle se déroule. L'enseignant doit concevoir des tâches en tenant compte des affordances, c'est-à-dire des possibilités d'action offertes par l'environnement, tout en respectant les trajectoires singulières de chaque élève.
La distinction entre activité réelle (ce que l'élève fait et pense) et tâche prescrite (ce que l'enseignant attend) est essentielle pour analyser et ajuster l'apprentissage. L'activité peut être individuelle, centrée sur la régulation personnelle pour atteindre un objectif technique ou didactique, ou collective, basée sur l'interaction, la répartition des rôles et la co-construction. La chaîne perceptivo-décisionnelle, composée de mécanismes perceptifs, décisionnels et effecteurs, régule cette activité. L'interaction avec les contraintes, selon Delignières (1998), fait émerger l'activité, qui évolue vers une organisation plus performante à travers l'apprentissage. L'activité en EPS est une expérience incarnée et située, intégrant processus cognitifs, émotionnels et moteurs dans un contexte spécifique.
Définir une situation d'apprentissage - Partie 1
L'Effort et la Charge Cognitive dans l'Apprentissage Moteur
L'effort en EPS est une construction complexe qui articule plusieurs dimensions : physiologique, cognitive et psychologique. Il se définit comme une mobilisation volontaire et adaptative des ressources du sujet pour faire face à une tâche contraignante (Garcin, 2002). Sur le plan physiologique, il concerne l’engagement face à la contrainte, associé à des paramètres de charge (intensité, volume, fréquence) et à des processus d’adaptation (Cazorla, 1997 ; Weineck, 1996).
La charge cognitive, désignée par Tricot (2022), représente la quantité de ressources mentales mobilisées lors de l’exécution d’une tâche. Elle est limitée par le canal de traitement de l’information (Welford, 1968) et susceptible d’être surchargée (Sweller, 1988). La perception de l’effort, qui est une interprétation consciente des sensations physiologiques, permet au sujet d’évaluer l’intensité de son engagement (Grappe, 2014). Cette perception est influencée par des marqueurs somatiques, qui intègrent des signaux corporels et émotionnels (Damasio, 2017). La régulation de l’effort dépend également de la motivation, du sentiment d’efficacité personnelle (Bandura, 2002) et des buts d’accomplissement. Ces derniers, décrits par Famose & Bertsch (2009) comme des objectifs liés à la maîtrise ou à l’évitement, influencent l'effort : la maîtrise encourage un effort soutenu alors que l’évitement peut conduire à l’auto-handicap (Famose, 2001).
Le Bien-être en EPS : Sécurité, Compétence et Reconnaissance
Le bien-être en EPS est un état global qui intègre sécurité, compétence et reconnaissance dans l’environnement scolaire (Morales, Thémines et Travaillot, 2024). Il repose sur une interaction harmonieuse entre l’individu et son milieu, où la perception de sécurité, la compétence perçue et la reconnaissance sociale jouent un rôle central. La notion dépasse la simple absence de douleur pour inclure le plaisir, l’estime de soi et le sentiment d’efficacité personnelle (Bandura).
La qualité des interactions sociales, notamment via la négociation pédagogique (Berne, 2013) et la gestion des conflits sociocognitifs (Mugny, 1997), favorise un climat propice au bien-être. L’image corporelle, influencée par le regard des pairs et les processus de comparaison, impacte également cette notion, particulièrement à l’adolescence (Cogérino, 2017 ; Montagne & Bui-Xuân, 2015). Un environnement sécurisant avec un risque perçu acceptable (Delignières, 2025) facilite une expérience positive. Enfin, le soutien social (Trépanier, 2019 ; Baudoin, 2021) constitue une protection essentielle pour la santé mentale, tandis que la pédagogie du sens (Develay, 1996) lie apprentissage et désir, transformant le plaisir en engagement profond.
L'Expérience Vécue et l'Approche Énactive
L'expérience en EPS est une interaction dynamique entre l'individu, la tâche et l'environnement, intégrant perception, émotion et intention. Selon Dewey (1938), elle résulte d'une interaction continue et évolutive. Pour qu’elle soit formatrice, cette expérience doit être structurée par la typification, qui lui donne une organisation typique, facilitant sa compréhension et sa mémorisation. La transformation de cette expérience en ressource d'apprentissage passe par la verbalisation et la réflexivité, qui permettent au sujet de prendre conscience de ses perceptions, émotions et intentions, et ainsi de stabiliser ses apprentissages (Mouchet, 2016 ; Theureau).
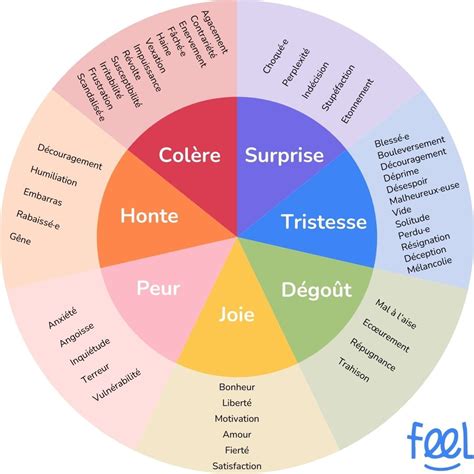
La dimension corporelle et perceptive est centrale, mobilisant le corps comme source de connaissance dans une approche énactive (Paintendre & Andrieu, 2019). Selon Récopé (2020), l'expérience vécue désigne ce que le sujet ressent, perçoit et les intentions qu'il projette dans l'action. Les émotions, en particulier celles qui surgissent lors d’une rupture entre attentes et perception, jouent un rôle majeur, pouvant devenir des marqueurs somatiques, guidant les comportements futurs (Damasio, 2017). La motivation, influencée par le sentiment d'efficacité personnelle, le climat motivationnel et les motifs d'agir, conditionne l’engagement de l’élève dans l’expérience, comme l'explique la théorie de l'autodétermination de Deci et Ryan (2016).
Le Transfert de l'Apprentissage et les Conditions de Pratique
L’influence des expériences antérieures sur la réalisation d’une activité dans un nouveau contexte ou sur l’apprentissage d’une nouvelle compétence peut se manifester de différentes manières. Il peut y avoir un effet bénéfique (transfert positif), un effet préjudiciable (transfert négatif), ou elle peut n’avoir aucun effet (transfert neutre) sur l’habileté motrice. Les conditions de pratique et les méthodes d’enseignement des habiletés motrices ont une influence évidente sur le transfert de l’apprentissage.
La pratique distribuée, variable et aléatoire donne de meilleurs résultats dans le maintien des compétences motrices. Elles sont donc recommandées pour stimuler le transfert de l’apprentissage. De même, l’apprentissage par observation peut stimuler le transfert en fonction de l’habileté motrice exécutée par le modèle sélectionné. La spécificité des effets présentés semble fournir un guide pour établir les déterminants de l’efficacité de la pratique lorsque l’on considère les conditions dans lesquelles la mise en œuvre et le transfert auront lieu. Les meilleures conditions de pratique sont celles qui exigent que le sujet pratique et apprenne les mêmes processus que ceux qu’il utilisera dans la vie de tous les jours.
Définir une situation d'apprentissage - Partie 1
Chaque compétence ou activité bénéficie des précédentes et bénéficiera également des futures. Il est essentiel de suivre la règle du simple au complexe dans l’enchaînement des compétences et des activités. Avant d’élaborer un programme de réadaptation, il faut tenir compte des expériences antérieures de l’individu en matière de compétences motrices. L’apprentissage moteur devrait guider le processus d’intervention clinique pour la rééducation du contrôle moteur. Dans l’entraînement d’une habileté motrice qui exige une performance dans un contexte où les conditions réglementaires ne changeront pas (structuré), la conception des conditions d’entraînement exigera du sujet qu’il exécute les compétences dans un contexte spécifique. Ceci est mis en évidence dans des ouvrages tels que "Motor control: Translating research into clinical Practice" de Shumway-Cook A et Woollacott MH, "Motor learning and control. Concepts and Applications" de Magill RA, ainsi que "Aprendizaje motor: teorías y técnicas" de Sánchez-Cabeza A et Arana-Echevarría JL, et "Terapia ocupacional para la rehabilitación del control motor. Tratamientos basados en actividades para pacientes con daño cerebral adquirido" de Sánchez-Cabeza A.
tags: #tuteur #apprentissage #cognitif #moteur